私たちは普段、無意識に「少し先の未来」を予測して動いています。人混みを歩くとき、数歩先の人々の動きを読み、ぶつからないルートを瞬時に選んでいるのです。この「未来を見越して現在の行動を決める」という高度なプロセスを、機械の世界で実現するのが「モデル予測制御(MPC)」です。なぜ今、この技術が世界の主役になりつつあるのか、その本質に迫ります。
【序章】 制御工学の新しい主役
現代社会は、見えない「手」によって動かされています。部屋の温度を快適に保つエアコン、一定速度で走行するクルーズコントロール、そして宇宙へ飛び立つロケット。これらはすべて、目的の状態を実現するために機械を操る「制御技術」の賜物です。これまで、この分野は熟練の職人のような古典的な技術が支えてきましたが、近年、その世界に革命が起きています。それが「モデル予測制御(MPC)」というキーワードです。
かつては一部の巨大な化学工場などでしか使われていなかったこの技術が、なぜ今、自動運転車やドローン、さらには家庭用ロボットにまで爆発的に普及し始めたのでしょうか。その背景には、私たちが操るシステムがかつてないほど複雑化し、従来のやり方では太刀打ちできなくなったという現実があります。
例えば、自動運転車は「車線を守る」「速度を保つ」だけでなく、「乗り心地を良くする」「燃費を抑える」「急な飛び出しを避ける」といった複数の矛盾する要求を同時に満たさなければなりません。これらを一手に引き受ける司令塔こそがMPCなのです。本稿では、難解な数式を一切使わず、この技術がいかにして「未来」を計算し、複雑な世界を導いているのか、その革新性を紐解いていきます。
【第一章】 PID制御の功績と、その「限界」
1.PID制御とは:現在と過去を見る「熟練の運転手」
モデル予測制御の凄さを理解するためには、まず現在世界中で最も普及している「PID制御」について知る必要があります。PID制御は、産業界の「縁の下の力持ち」であり、例えるなら「バックミラーと現在のスピードメーターだけを見て運転する熟練ドライバー」のようなものです。
2.フィードバック制御の直感的な仕組み
最も身近な例として、お風呂の温度調節を想像してください。あなたは湯加減を見ながら、「熱すぎる」と感じたら水を足し、「ぬるすぎる」と感じたらお湯を足します。これがPID制御の基本である「フィードバック制御」です。「目標(適温)」と「現在(実際の湯温)」のズレ(誤差)を見て、そのズレを埋めるように操作を行います。 ズレが大きいときは大きくバルブを開け、目標に近づくにつれて操作を小さくする。このシンプルながら強力な仕組みにより、世の中の機械の9割以上はPID制御で動いていると言われています。
3.「制約」という壁:アクセル全開の危険性
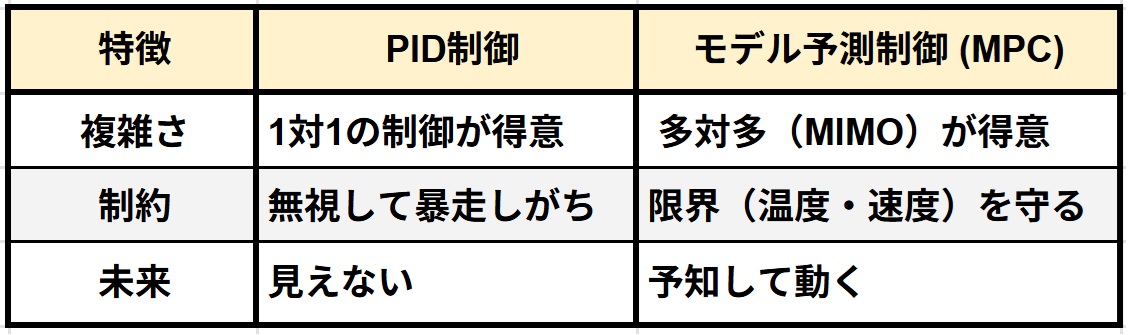
しかし、PIDには決定的な弱点があります。それは「限界(制約)」をあらかじめ考慮できないことです。 例えば、どんなに急いで目標温度にしたくても、バルブの大きさには物理的な限界があります。あるいは、車の運転で「目標地点まで最速で」と指示されたPID制御は、エンジンの性能限界や制限速度を無視してアクセルを全開にしようとするかもしれません。結果として、オーバーヒートしたり、スピード違反を犯したりします。PIDは「ズレを直す」ことには長けていますが、「ルールを守る」ことや「物理的な限界」を事前に察知して、手前でセーブするといった賢い判断が苦手なのです。
4.複雑な状況への弱点:あちらを立てればこちらが立たず
さらに厄介なのが、操作したい項目が複数ある場合です。ドローンを想像してください。高さを変えようとしてプロペラの回転数を上げると、同時に機体のバランスや水平位置も微妙に変わってしまいます。 「高さを合わせると位置がズレる」「位置を直すと高さが変わる」というイタチごっこが発生するのです。これを「相互干渉」と呼びます。PID制御は基本的に「1つの目的に対して1つの操作」を行うのが得意なため、このようにあちらを立てればこちらが立たず、という複雑に絡み合ったシステムを制御しようとすると、調整が極めて困難になります。この限界を突破するために求められたのが、未来を見通す力を持つ制御手法だったのです。
【第二章】 モデル予測制御の正体:「未来」を見...
私たちは普段、無意識に「少し先の未来」を予測して動いています。人混みを歩くとき、数歩先の人々の動きを読み、ぶつからないルートを瞬時に選んでいるのです。この「未来を見越して現在の行動を決める」という高度なプロセスを、機械の世界で実現するのが「モデル予測制御(MPC)」です。なぜ今、この技術が世界の主役になりつつあるのか、その本質に迫ります。
【序章】 制御工学の新しい主役
現代社会は、見えない「手」によって動かされています。部屋の温度を快適に保つエアコン、一定速度で走行するクルーズコントロール、そして宇宙へ飛び立つロケット。これらはすべて、目的の状態を実現するために機械を操る「制御技術」の賜物です。これまで、この分野は熟練の職人のような古典的な技術が支えてきましたが、近年、その世界に革命が起きています。それが「モデル予測制御(MPC)」というキーワードです。
かつては一部の巨大な化学工場などでしか使われていなかったこの技術が、なぜ今、自動運転車やドローン、さらには家庭用ロボットにまで爆発的に普及し始めたのでしょうか。その背景には、私たちが操るシステムがかつてないほど複雑化し、従来のやり方では太刀打ちできなくなったという現実があります。
例えば、自動運転車は「車線を守る」「速度を保つ」だけでなく、「乗り心地を良くする」「燃費を抑える」「急な飛び出しを避ける」といった複数の矛盾する要求を同時に満たさなければなりません。これらを一手に引き受ける司令塔こそがMPCなのです。本稿では、難解な数式を一切使わず、この技術がいかにして「未来」を計算し、複雑な世界を導いているのか、その革新性を紐解いていきます。
【第一章】 PID制御の功績と、その「限界」
1.PID制御とは:現在と過去を見る「熟練の運転手」
モデル予測制御の凄さを理解するためには、まず現在世界中で最も普及している「PID制御」について知る必要があります。PID制御は、産業界の「縁の下の力持ち」であり、例えるなら「バックミラーと現在のスピードメーターだけを見て運転する熟練ドライバー」のようなものです。
2.フィードバック制御の直感的な仕組み
最も身近な例として、お風呂の温度調節を想像してください。あなたは湯加減を見ながら、「熱すぎる」と感じたら水を足し、「ぬるすぎる」と感じたらお湯を足します。これがPID制御の基本である「フィードバック制御」です。「目標(適温)」と「現在(実際の湯温)」のズレ(誤差)を見て、そのズレを埋めるように操作を行います。 ズレが大きいときは大きくバルブを開け、目標に近づくにつれて操作を小さくする。このシンプルながら強力な仕組みにより、世の中の機械の9割以上はPID制御で動いていると言われています。
3.「制約」という壁:アクセル全開の危険性
しかし、PIDには決定的な弱点があります。それは「限界(制約)」をあらかじめ考慮できないことです。 例えば、どんなに急いで目標温度にしたくても、バルブの大きさには物理的な限界があります。あるいは、車の運転で「目標地点まで最速で」と指示されたPID制御は、エンジンの性能限界や制限速度を無視してアクセルを全開にしようとするかもしれません。結果として、オーバーヒートしたり、スピード違反を犯したりします。PIDは「ズレを直す」ことには長けていますが、「ルールを守る」ことや「物理的な限界」を事前に察知して、手前でセーブするといった賢い判断が苦手なのです。
4.複雑な状況への弱点:あちらを立てればこちらが立たず
さらに厄介なのが、操作したい項目が複数ある場合です。ドローンを想像してください。高さを変えようとしてプロペラの回転数を上げると、同時に機体のバランスや水平位置も微妙に変わってしまいます。 「高さを合わせると位置がズレる」「位置を直すと高さが変わる」というイタチごっこが発生するのです。これを「相互干渉」と呼びます。PID制御は基本的に「1つの目的に対して1つの操作」を行うのが得意なため、このようにあちらを立てればこちらが立たず、という複雑に絡み合ったシステムを制御しようとすると、調整が極めて困難になります。この限界を突破するために求められたのが、未来を見通す力を持つ制御手法だったのです。
【第二章】 モデル予測制御の正体:「未来」を見通す力
1.MPCの基本概念:カーナビとドライバーの融合
PID制御が「過去と現在」を見て動くのに対し、モデル予測制御(MPC)は「未来」を見て動きます。そのイメージは、優秀なカーナビとドライバーが一体化したようなものです。 MPCは、単に行き当たりばったりでハンドルを切るのではなく、「今の速度でハンドルをこれくらい切ると、3秒後には車はあそこにあるはずだ」というシミュレーションを頭の中で絶えず行っています。
2.「予測」して「最適解」を選ぶプロセス
具体的には、MPCは次の2つのステップを高速で繰り返しています。 第一に「予測」です。対象となる機械の「モデル(動きのルール)」を使って、これから先の未来の挙動を数秒先までシミュレーションします。「アクセルを弱めた場合」「強めた場合」「ハンドルを切った場合」など、いくつもの未来のシナリオを予測するのです。 第二に「最適化」です。予測された無数の未来の中から、最も望ましい結果(一番安全で、一番燃料を使わず、一番早く着くルート)を選び出します。
3.リシーディング・ホライゾン:常に更新される未来
MPCの最大の特徴は、「リシーディング・ホライゾン(Receding Horizon)」と呼ばれる仕組みにあります。これは「逃げる地平線」という意味です。 例えば、MPCは「今後10秒間の最適な運転計画」を計算します。しかし、計算した計画を10秒間そのまま実行するわけではありません。最初の「0.1秒分」だけを実行し、すぐにまた「その時点から10秒先」を計算し直すのです。 なぜなら、現実世界では突然の突風が吹いたり、路面が滑りやすかったりと、予測できない外乱が起こるからです。一度立てた計画に固執せず、瞬きするほどの短い間隔で常に「最新の状況からの未来」を計算し直し、計画を修正し続ける。これにより、予期せぬ変化にも柔軟に対応しながら、常にベストな行動を取り続けることができます。
4.「モデル」とは何か:対象の動きをシミュレーションする脳内地図
この制御の核心にあるのが「モデル」です。これはコンピュータの中に再現された「対象の分身」のようなものです。車であれば「ハンドルを何度回せば、タイヤがどう曲がり、車体がどう傾くか」という物理法則がプログラムされています。 この正確な脳内地図(モデル)があるからこそ、MPCは実際に失敗することなく、脳内で何百回ものトライアンドエラーを行い、成功する未来だけを現実世界で実行できるのです。つまりMPCとは、シミュレーション能力を持った、極めて慎重かつ大胆な司令塔と言えるでしょう。
【第三章】 MPCがもたらす4つの革新的メリット
MPCが選ばれる理由は、次の「得意技」があるからです。
1.多入力多出力(MIMO)系への対応:オーケストラの指揮者
MPCの一つ目の革新は、複雑に絡み合ったシステムをたった一人で指揮できる点です。これを専門用語で多入力多出力(MIMO)系への対応と呼びます。 例えば、4つのプロペラを持つドローンが空中で静止(ホバリング)する場合を考えてみましょう。PID制御であれば、高さ担当、前後担当、左右担当の制御器が別々に働き、お互いに邪魔し合うことがありました。 しかしMPCは、オーケストラの指揮者のように振る舞います。「右前のプロペラを強めつつ、左後ろを弱めれば、高さは維持したまま右へ移動できる」といった具合に、全てのプロペラの因果関係を理解した上で、全体の調和が取れるような指令を一度に出せるのです。これにより、非常に不安定なシステムでも驚くほど安定して動かすことが可能になります。
2.最適制御が可能:ただ動くのではなく「賢く」動く
二つ目は、「目的意識」を持てることです。MPCには「評価関数(コスト関数)」と呼ばれる、行動の良し悪しを採点する基準を持たせることができます。 これを日常用語で言えば、「今回の運転のテーマ」を設定できるということです。「とにかく急いで(時間最小)」「ガソリン代を節約して(燃料最小)」「中のケーキを崩さないように(揺れ最小)」といった具体的な要望を数理的に設定できます。 MPCは、予測される未来の動きすべてに対してこの採点を行い、「最も点数が良い(コストが低い)動き」を選びます。ただ目標に到達するだけでなく、その過程の「質」までコントロールできるのが大きな強みです。
3.拘束条件(制約)の処理:ルールを守る安全性
三つ目は、絶対に破ってはいけないルール、すなわち「制約」を扱えることです。これは実社会での安全確保において極めて重要です。 PID制御では「バルブを全開にしろ!」という無茶な指令が出ることがありましたが、MPCは「バルブは0%から100%の間でしか動かない」「温度は絶対に100度を超えてはいけない」といった物理的・安全的な限界をあらかじめ知っています。 未来を予測する際、このルールを破るようなシナリオは最初から「不適」として切り捨てられます。そのため、人間が介入せずとも、機械自身が自分の限界をわきまえ、安全な範囲内で最大限のパフォーマンスを発揮するような動きが可能になるのです。
4.離散変数の扱い:デジタルなスイッチ操作も思いのまま
四つ目は、カチッカチッと切り替わる「離散的」な動作の計画です。 多くの物理現象は滑らかに変化しますが、機械の操作には「ギアを1速から2速に変える」「スイッチをONにする」といった、中間のない切り替え動作が含まれます。 従来の数学的手法ではこの「段差」の扱いは苦手でしたが、近年のMPC(特にハイブリッドMPCと呼ばれるもの)は、こうしたスイッチの切り替えタイミングさえも、未来の挙動の一部として計算に組み込むことができます。「3秒後にギアを上げることが、トータルで見れば最も省エネになる」といった高度な判断が可能になるのです。
【第四章】 機械系リアルタイム制御への挑戦と勝利
1.かつての弱点:計算時間の壁
これほど優秀なMPCが、なぜ「今」になって注目されているのでしょうか。実はMPCの理論自体は数十年前から存在していました。しかし、長い間、化学プラントや石油精製所といった「動きのゆっくりした巨大施設」でしか使われてきませんでした。 その理由は単純で、「計算に時間がかかりすぎた」からです。未来をシミュレーションし、無数の選択肢から最適解を見つける計算は膨大です。かつてのコンピュータでは、次の瞬間の計算が終わるころには、現実世界はずっと先に進んでしまっていました。まさに「考えすぎて動けない」状態だったのです。
2.「考えすぎて動けない」状態からの脱却
1秒間に何十メートルも進む自動車や、瞬時バランスを取るロボットを制御するには、1000分の1秒(ミリ秒)単位で計算を完了させなければなりません。長らくの間、これは不可能だと考えられてきました。 しかし、21世紀に入り、状況は一変しました。
3.高速計算アルゴリズムとハードウェアの進化
最大の勝因は、コンピュータの劇的な進化(ムーアの法則)と、計算を効率化する「アルゴリズム」の飛躍的な進歩です。 特に、最適化問題を解くための専用ソルバー(計算手順)が洗練され、不必要な計算を賢く省く技術が開発されました。さらに、組み込みシステム向けの小型で高性能なチップが登場したことで、巨大なサーバールームではなく、車やロボットの中に搭載された小さな基板の上で、複雑なMPCの計算を瞬時に行えるようになったのです。
4.機械系(メカトロニクス)への適用が生む価値
この「リアルタイム制御への勝利」が、現在の自動運転やロボット工学のブレイクスルーを生みました。 例えば、Boston Dynamics社のロボットがバク宙を決めたり、悪路でも転ばずに歩けたりするのは、重心の位置や足の運び方をMPCを用いてリアルタイムで最適化しているからです。また、自動運転車が高速道路でスムーズに車線変更できるのも、周囲の車の未来の位置を予測しながら、自車の軌道を計算し続けているからです。 かつては「遅いシステム」専用だったMPCは、計算の壁を突破したことで、生物のように滑らかに動く「速い機械」の頭脳へと進化したのです。
【終章】 予知する制御が創る未来
モデル予測制御(MPC)は、単なる工学的なテクニックを超え、機械に「予知能力」と「判断力」を与える技術へと昇華しつつあります。 今、この技術はさらなる進化を遂げようとしています。それがAI(人工知能)や機械学習との融合です。
【コラム:AI(強化学習)とMPCの違いは?】
よく比較される「強化学習」は、試行錯誤(データ)から最適解を学びます。一方MPCは、物理法則(モデル)から最適解を計算します。
- 強化学習: データさえあれば未知の現象も扱えるが、学習に時間がかかる。
- MPC: モデルが必要だが、物理的にあり得ない挙動はしない(安全)。
最近では、この両者を組み合わせた「学習型MPC」も登場しています。
これまでは人間が手作業で作っていた「モデル(脳内地図)」を、AIがデータから自動で学習・修正する手法が登場しています。これにより、経年劣化で機械の特性が変わっても、自ら適応し続ける究極の制御が可能になります。私たちは今、「プログラムされた通りに動く制御」から、「環境を理解し、自律的に最適解を導き出す制御」への転換点にいます。数式を理解することは重要ですが、それ以上に大切なのは、この「未来を予測して、現在の行動を律する」という思考プロセスが、複雑な問題を解決する鍵であると知ることです。MPCという見えない司令塔は、これからも私たちの社会を、より安全で、より滑らかに導いてくれることでしょう。
◆連載記事紹介:ものづくりドットコムの人気連載記事をまとめたページはこちら!