New! 自己位置推定・マッピングの最新技術動向<カメラ,IMU,無線>
セミナー趣旨
デバイスの自己位置推定や空間形状認識(マッピング)は,自動走行制御,ナビゲーション,写真測量などに用いられる基盤技術である.近年は,カメラを用いたvisual SLAMの飛躍的進展により,ARCoreやARKitに代表されるように,スマートフォン向けの拡張現実感アプリケーションを容易に実装できる環境が整ってきた.研究開発は今後も高精度化・省エネ化に向けて加速すると見込まれる.
本セミナーでは,様々なセンサーを用いた自己位置推定技術を概説する.まず,visual SLAMの歴史から最新動向までを整理し,ORB-SLAMを例に処理手順や高精度化のポイントを示す.続いて,ARCoreやARKitに実装されているvisual–inertial SLAMを取り上げ,スマートフォンにおけるIMUとカメラの融合推定がどのように実現されているかを概説する.さらに近年注目されるNeRFやGaussian Splattingによる高品質な空間再構成について,SLAMやマッピングへの応用可能性と技術的特徴を解説する.
次に,visual SLAMと比較して極めて省エネなIMU単体によるDead Reckoning(DR),wifiやBLEといった無線を用いた屋内測位技術を紹介する.特に人間の歩行軌跡を対象とするPedestrian Dead Reckoning (PDR)について,国際会議IPINで開催されたコンペティションに参加し開発した手法を扱う.
最後に,国際会議IPINのコンペティションにおいて優勝に至った2019,2024,2025年のアルゴリズムを整理し,歩行者航法におけるIMU,BLE,UWD,マップマッチング,機械学習モデルの統合戦略や改良点を解説する.
セミナープログラム
1 vSLAMの原理と画像処理技術
2 ORB-SLAMを例とした単眼SLAM
3 動的環境下におけるSLAM
4 ディープラーニングを用いたSLAM
5 NeRFとGaussian Splattingを用いた空間表現
6 IMUを用いたDead Reckoning
7 BLEを用いた屋内測位
8 IPINで優勝した際の歩行者航法アルゴリズム(2019, 2024, 2025)
セミナー講師
内山英昭(うちやまひであき) 氏
奈良先端科学技術大学院大学 先端科学技術研究科 情報科学領域 サイバネティクス・リアリティ工学研究室(CAREラボ)
准教授
2006年3月 慶應義塾大学 理工学部 情報工学科 卒業
2007年9月 慶應義塾大学大学院 開放環境科学専攻 修士課程 修了
2010年9月 慶應義塾大学大学院 開放環境科学専攻 博士課程 修了
2010年10月-2012年6月 フランス国立情報学自動制御研究所 博士研究員
2012年7月-2014年3月 株式会社東芝 研究開発センター
2014年4月 九州大学大学院 システム情報科学研究院 助教
2018年4月 九州大学 附属図書館 准教授
2021年4月 現職
拡張現実感のためのコンピュータビジョン技術の研究に従事.2012年より3年間,拡張現実感に関する国際会議International Symposium on Mixed and Augmented Reality(ISMAR)の論文選定委員を歴任.2015年のISMAR及び2016年のVR学会で開催されたvisual SLAMの性能を競うトラッキングコンペティションを運営.visual SLAMのオープンソースのライブラリであるATAM(Abecedary Tracking and Mapping)を開発[1].拡張現実感に用いられる位置合わせ技術に関する本[2]や解説論文[3]を執筆.
[1] https://github.com/CVfAR/ATAM
[2] AR(拡張現実)技術の基礎・発展・実践 (設計技術シリーズ),科学情報出版(第一章担当)
[3] E.Marchand, H.Uchiyama and F. Spindler, “Pose Estimation for Augmented Reality: A Hands-On Survey,” IEEE Transactions on Visualization and Computer Graphics, vol.22, pp.2633-2651, 2016.
セミナー受講料
お1人様受講の場合 53,900円[税込]/1名
1口でお申込の場合 66,000円[税込]/1口(3名まで受講可能)
主催者
開催場所
全国
受講について
- 本セミナーの受講にあたっての推奨環境は「Zoom」に依存しますので、ご自分の環境が対応しているか、お申込み前にZoomのテストミーティング(http://zoom.us/test)にアクセスできることをご確認下さい。
- インターネット経由でのライブ中継ため、回線状態などにより、画像や音声が乱れる場合があります。講義の中断、さらには、再接続後の再開もありますが、予めご了承ください。
- 受講中の録音・撮影等は固くお断りいたします。
キーワード



関連記事
もっと見る-
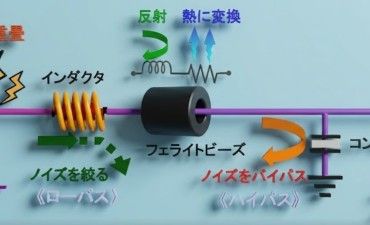
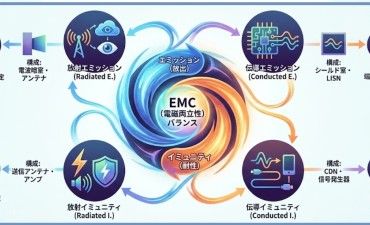
回路設計におけるノイズ除去技術~フェライトビーズ等の特性を活かした最適対策の指針~
【目次】 現代の電子機器設計において、ノイズ対策は避けて通れない極めて重要な課題です。ノイズは伝播経路によって対策が異なり、各部品の... -
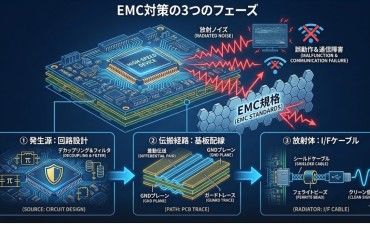
【プリント基板の放射ノイズ低減技術】デバイスからI/Fケーブルまでの具体的対策手法
【目次】 近年、電子機器の高機能化と高速信号処理の進展に伴い、プリント基板から発生する放射ノイズへの対策はますます困...