【中止】<基礎から学べる>アナログ回路設計 ~失敗しないアナログ回路の設計手法とノイズ対策~
アナログ量を正しく取り扱うための基本技術、半導体デバイスとその利用法、増幅回路やアナログ信号の処理技術、ノイズの種類とノイズ対策などについてわかりやすく解説致します。
セミナー趣旨
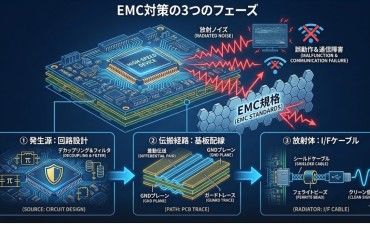
電気自動車、自動運転、工場用ロボット、家電製品やサービスロボットなどの性能向上や高機能化は、留まることなく進化を続けています。これらを制御しているのは電子回路とマイクロコンピュータです。温度や速度など自然界に存在しているものは、基本的にアナログ量です。ディジタル回路の設計は、アナログ回路の延長線上にあり、アナログ回路を理解して行うことが重要で、ノイズを放散せず、ノイズの影響を受けにくい回路を設計することができます。最近はEMIやEMS特性の良い製品が求められ、EMC対策が要求されています。
制御システムの設計においては、制御対象は電圧や電流、速度などのアナログ量です。本講座では、アナログ量を正しく取り扱うための基本技術、半導体デバイスとその利用法、増幅回路やアナログ信号の処理技術、ノイズの種類とノイズ対策などについて、はじめてアナログ回路を扱う方から実用的な電子回路を設計する方々を対象に解説を行います。
受講対象・レベル
1. 電子部品や電子回路の基礎を学びたい技術者
2. アナログ回路およびアナログ信号処理について学びたい技術者
3. アナログ回路や電子回路基板の設計に携わろうとしている技術者
4. ノイズの原因やノイズ対策を学びたい技術者
5. 新しい電子制御システムを設計・開発したい企業の技術者
必要な予備知識
特にありませんが、電気回路に関する予備知識があると理解しやすいと思います。
習得できる知識
1. 電子部品や半導体の使い方、電気回路の基本特性がわかる
2. 増幅回路やアナログ信号処理回路の特性と回路構成法がわかる
3. アナログ電子回路の応用回路や設計法がわかる
4. 浮遊容量などによる信号への影響がわかる
5. ノイズの原因とノイズを低減する手法がわかる
セミナープログラム
1. アナログ回路を構成する基本部品と回路特性
1.1 抵抗、キャパシタ(コンデンサ)、インダクタンス
1.2 オームの法則
1.3 インピーダンスと位相
1.4 直列共振と並列共振
1.5 実際の抵抗、キャパシタの特性
2. 半導体デバイスと利用法
2.1 ダイオード
2.2 トランジスタ
2.3 JFETとMOSFET
2.4 オペアンプ、コンパレータ
2.5 整流回路と出力電圧
2.6 トランジスタの動作領域
2.7 デバイスを破壊しないために
3. 増幅回路
3.1 直流信号および交流信号の増幅
3.2 オペアンプを用いた増幅回路
3.3 アナログ信号の比較
3.4 微小信号の増幅回路
3.5 微小信号の整流回路
3.6 大きな電流が出力できる増幅回路
3.7 パワーオペアンプ回路
4. アナログ信号処理回路
4.1 加算回路、微分回路、積分回路
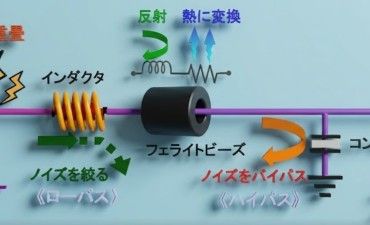
4.2 ローパスフィルタ回路
4.3 ハイパスフィルタ回路
4.4 バンドパスフィルタ回路
4.5 ノッチフィルタ回路
5. アナログ回路例
5.1 電圧制御回路
5.2 電流制御回路
5.3 電源回路
5.4 負電圧の発生回路
5.5 供給電圧より高い電圧の発生回路
6. ノイズ対策
6.1 信号の伝達、増幅器とノイズ
6.2 プリント基板上でのノイズ伝達と対策
6.3 浮遊容量に対するノイズ対策
6.4 浮遊容量に対するサージ電圧対策と効果
6.5 ノーマルモードノイズと対策
6.6 コモンモードノイズと対策
6.7 ノイズを放出しにくいシステム構成
セミナー講師
高橋 久 先生 静岡理工科大学 総合技術研究所 客員教授 博士(工学)
【略歴】
(1) 海外勤務
1997年~1999年 中国天津工程技術師範大学 自動化学科教員への技術指導
2001年 シンガポール南洋理工大学 電気電子学科特別講義(集中講義)
(2) 略歴
1994年4月 職業能力開発総合大学校 工学研究科 専任准教授
1997年~1999年 国家プロジェクトとして、天津工程技術師範大学
(Tianjin University of Technology and Education)に出向
2011年9月 職業能力開発総合大学校 退職
2011年10月 静岡理工科大学大学院 理工学研究科 専任教授として着任
2013年4月~2017年3月 静岡理工科大学 エデュケーションサイト長
2013年4月~2017年3月 静岡理工科大学 創造工学センター長
2018年3月 定年退職
2018年4月 静岡理工科大学 大学院理工学研究科 特任教授として着任
2018年4月~2019年3月 総合技術研究所副所長、 研究推進委員会副委員長
2020年3月 静岡理工科大学 退職
2020年4月~ 静岡理工科大学 総合技術研究所 客員教授
2021年1月 電動モビリティシステム専門職大学(設置認可申請中)
学部長(予定) 兼 専任教授として着任予定(2023年4月開学予定)
【専門】
電子回路工学/制御工学/モータ応用工学
【本テーマ関連学協会での活動】
電気学会 小形モータ関連委員会 委員長(2期 4年間)
電気学会 回転機技術委員会2号議員(2期 4年間)
電気学会 小形モータ関連委員会 幹事・委員(1992年~現在に至る)
電気学会 論文査読委員(2000年~現在に至る)
浜松地域イノベーション推進機構 パワエレ事業化研究会 会長(6年間)
モータドライブ応用研究会 代表幹事(6年間)
自動運転関連 有識者会議 委員(2017年~現在に至る)
セミナー受講料
【オンラインセミナー(見逃し視聴なし)】:1名47,300円(税込(消費税10%)、資料付)
*1社2名以上同時申込の場合、1名につき36,300円
【オンラインセミナー(見逃し視聴あり)】:1名52,800円(税込(消費税10%)、資料付)
*1社2名以上同時申込の場合、1名につき41,800円
*学校法人割引;学生、教員のご参加は受講料50%割引。
主催者
開催場所
全国
受講について
※本講座は、お手許のPCやタブレット等で受講できるオンラインセミナーです。
配布資料・講師への質問等について
- 配布資料は、印刷物を郵送で送付致します。
お申込の際はお受け取り可能な住所をご記入ください。
お申込みは4営業日前までを推奨します。
それ以降でもお申込みはお受けしておりますが(開催1営業日前の12:00まで)、
テキスト到着がセミナー後になる可能性がございます。 - 当日、可能な範囲で質疑応答も対応致します。
(全ての質問にお答えできない可能性もございますので、予めご容赦ください。) - 本講座で使用する資料や配信動画は著作物であり、
無断での録音・録画・複写・転載・配布・上映・販売等を禁止致します。
下記ご確認の上、お申込み下さい
- PCもしくはタブレット・スマートフォンとネットワーク環境をご準備下さい。
- ご受講にあたり、環境の確認をお願いしております(20Mbbs以上の回線をご用意下さい)。
各ご利用ツール別の動作確認の上、お申し込み下さい。 - 開催が近くなりましたら、当日の流れ及び視聴用のURL等をメールにてご連絡致します。
Zoomを使用したオンラインセミナーとなります
- ご受講にあたり、環境の確認をお願いしております。
お手数ですが下記公式サイトからZoomが問題なく使えるかどうか、ご確認下さい。
→ 確認はこちら
※Skype/Teams/LINEなど別のミーティングアプリが起動していると、Zoomでカメラ・マイクが使えない事があります。お手数ですがこれらのツールはいったん閉じてお試し下さい。 - Zoomアプリのインストール、Zoomへのサインアップをせずブラウザからの参加も可能です。
※一部のブラウザは音声(音声参加ができない)が聞こえない場合があります。
必ずテストサイトからチェック下さい。
対応ブラウザーについて(公式) ;
「コンピューターのオーディオに参加」に対応してないものは音声が聞こえません。
申込み時に(見逃し視聴有り)を選択された方は、見逃し視聴が可能です
- 開催5営業日以内に録画動画の配信を行います(一部、編集加工します)。
- 視聴可能期間は配信開始から1週間です。
セミナーを復習したい方、当日の受講が難しい方、期間内であれば動画を何度も視聴できます。
尚、閲覧用のURLはメールにてご連絡致します。
※万一、見逃し視聴の提供ができなくなった場合、
(見逃し視聴有り)の方の受講料は(見逃し視聴無し)の受講料に準じますので、ご了承下さい。
→こちらから問題なく視聴できるかご確認下さい(テスト視聴動画へ)パスワード「123456」

関連記事
もっと見る-

機能性フィラーの役割と技術動向、増量材から次世代の機能付与材への進化
【目次】 私たちの身の回りにあるプラスチック製品、その性能を陰で支えているのが「フィラー(充填材)」です。かつてはコスト削減のための... -
AI半導体の進化を支える「HBM」の役割、「メモリの壁」の克服と業界動向
【目次】 今、世界中で爆発的な広がりを見せる生成AI。私たちが日常でAIと対話するその裏側では、想像を絶する量のデータ処理が行われて...