「ロボットを導入したが、力加減が難しく対象物を壊してしまう」「熟練者の絶妙な手業を自動化したいが、数値化できず足踏みしている」、従来のロボットが苦手としていた「柔軟な力制御」を、高価なセンサを使わずに実現する技術として『リアルハプティクス』が注目されています。本稿では、センサレスで力を推定する仕組みや、感触を双方向に伝えるバイラテラル制御、そして医療や製造業での活用事例を解説します。この記事を読むことで、壊れやすい力覚センサに頼らない低コストな自動化の手法や、遠隔操作のミスを防ぐ触覚フィードバックの導入、職人技をデータ化して継承する具体的なアプローチを習得できます。
<記事を最後までお読みいただくことで、実務における以下の課題や悩みが解決します>
- 熟練技術者の高齢化と引退に伴い、属人化している「職人の絶妙な力加減」をどのようにシステムへ継承させるかという課題
- 複雑な形状の部品や、柔らかい対象物を扱う作業において、ロボット導入を妨げていた「対象物を壊してしまう」という悩み
- 危険な現場や極限環境における遠隔操作で、作業者に疲労や操作ミスを強いていた「直感的な操作感の欠如」の解消
- 高価で壊れやすい力覚センサに依存せず、コストとメンテナンスの手間を抑えた柔軟な自動化設備の導入手法
- 自社の現場(製造、医療、農業、建設など)に、次世代のロボット技術を応用するための具体的なユースケースの発見
第1章 自動化の限界を露呈する「力加減」の壁と、従来型センサのジレンマ
現代の産業界において、生産性の向上や深刻な人手不足の解消を目指した機械化・自動化は、あらゆる業種において急務となっています。定型的な作業を高速かつ正確に繰り返す点において、現在の産業用ロボットはすでに人間をはるかに凌駕する能力を発揮しています。しかし、ひとたび「あらかじめプログラミングされていない不規則な状況」や「未知の対象物との接触」が発生すると、途端に無力になってしまうという現実があります。その最大の原因は、現在のロボットが「力加減」を直感的に調整できないことにあります。
人間は、例えばテーブルの上に置かれた紙コップを持ち上げる際、コップがプラスチック製で硬いのか、あるいは紙製で柔らかく、強く握ると潰れてしまうのかを視覚と過去の経験から予測し、指先に伝わる感触を頼りに瞬時に力を調整します。柔らかければ優しく包み込み、重ければ落とさないようにしっかりと握りしめます。しかし、従来のロボット制御は、あらかじめ指定された位置まで指定された速度で動く「位置制御」が基本です。紙コップがあろうとなかろうと、プログラムされた座標までアームを動かし、決められた力でつかもうとします。その結果、少しでも位置がずれたり、想定より柔らかい対象物であったりすると、対象物を破壊してしまうか、逆にすべり落としてしまうのです。
この「接触状態に応じた柔軟な力の調整」を実現するために、これまではロボットの先端に「力覚センサ」と呼ばれる装置を取り付けるアプローチが主流でした。力覚センサは、対象物に触れた際の反発力を電気信号として読み取り、ロボットに「どれくらいの力がかかっているか」を伝える役割を果たします。しかし、この力覚センサ方式には実務上、非常に大きなジレンマが伴います。第一に、センサ自体が非常に高価であり、導入コストが跳ね上がる点です。第二に、センサは感度を高くすればするほど構造が繊細になり、ロボットが予期せぬ障害物に衝突した際の衝撃などで容易に破損してしまうという物理的な弱点を持っています。
さらに、工場などのノイズが多い環境では、センサが微細な電気的ノイズを拾ってしまい、誤作動を引き起こすリスクも常に付きまといます。作業のたびに厳密な調整とキャリブレーションが必要となり、結果として「力覚センサを導入したものの、メンテナンスの手間ばかりが増えて現場で使い物にならない」という事態が頻発しています。このように、従来のロボット制御と既存のセンサ技術の延長線上には、私たちが求める「人間のような柔軟な力加減」を実現するための高い壁が立ちはだかっており、これこそが自動化を妨げる最大のボトルネックとなっているのです。
【会員様限定】 この先に、力加減を「遠隔・自動化」へ繋げる要諦があります
ここから先は、離れた場所の感触をリアルに伝える「バイラテラル制御」の仕組みや、農業の収穫から医療・建設現場まで多岐にわたる産業別ユースケース、そして熟練者の技をコピーして自動化する具体的なアプローチについて詳しく解説します。
この記事で得られる具体的ベネフィット
- 視覚情報だけに頼らず、手の感触を頼りに繊細な遠隔操作を可能にするシステム構築の要領がわかります
- 職人の「位置」と「力」をデータ化して保存し、ロボットで完璧に再現(モーションコピー)する手法が掴めます
- 5Gなどの次世代通信を活用し、通信遅延による不安定化(発振)を防いで安定稼働させる実務的な留意点が理解できます
第2章 センサレスで力を推定する革新技...
「ロボットを導入したが、力加減が難しく対象物を壊してしまう」「熟練者の絶妙な手業を自動化したいが、数値化できず足踏みしている」、従来のロボットが苦手としていた「柔軟な力制御」を、高価なセンサを使わずに実現する技術として『リアルハプティクス』が注目されています。本稿では、センサレスで力を推定する仕組みや、感触を双方向に伝えるバイラテラル制御、そして医療や製造業での活用事例を解説します。この記事を読むことで、壊れやすい力覚センサに頼らない低コストな自動化の手法や、遠隔操作のミスを防ぐ触覚フィードバックの導入、職人技をデータ化して継承する具体的なアプローチを習得できます。
<記事を最後までお読みいただくことで、実務における以下の課題や悩みが解決します>
- 熟練技術者の高齢化と引退に伴い、属人化している「職人の絶妙な力加減」をどのようにシステムへ継承させるかという課題
- 複雑な形状の部品や、柔らかい対象物を扱う作業において、ロボット導入を妨げていた「対象物を壊してしまう」という悩み
- 危険な現場や極限環境における遠隔操作で、作業者に疲労や操作ミスを強いていた「直感的な操作感の欠如」の解消
- 高価で壊れやすい力覚センサに依存せず、コストとメンテナンスの手間を抑えた柔軟な自動化設備の導入手法
- 自社の現場(製造、医療、農業、建設など)に、次世代のロボット技術を応用するための具体的なユースケースの発見
第1章 自動化の限界を露呈する「力加減」の壁と、従来型センサのジレンマ
現代の産業界において、生産性の向上や深刻な人手不足の解消を目指した機械化・自動化は、あらゆる業種において急務となっています。定型的な作業を高速かつ正確に繰り返す点において、現在の産業用ロボットはすでに人間をはるかに凌駕する能力を発揮しています。しかし、ひとたび「あらかじめプログラミングされていない不規則な状況」や「未知の対象物との接触」が発生すると、途端に無力になってしまうという現実があります。その最大の原因は、現在のロボットが「力加減」を直感的に調整できないことにあります。
人間は、例えばテーブルの上に置かれた紙コップを持ち上げる際、コップがプラスチック製で硬いのか、あるいは紙製で柔らかく、強く握ると潰れてしまうのかを視覚と過去の経験から予測し、指先に伝わる感触を頼りに瞬時に力を調整します。柔らかければ優しく包み込み、重ければ落とさないようにしっかりと握りしめます。しかし、従来のロボット制御は、あらかじめ指定された位置まで指定された速度で動く「位置制御」が基本です。紙コップがあろうとなかろうと、プログラムされた座標までアームを動かし、決められた力でつかもうとします。その結果、少しでも位置がずれたり、想定より柔らかい対象物であったりすると、対象物を破壊してしまうか、逆にすべり落としてしまうのです。
この「接触状態に応じた柔軟な力の調整」を実現するために、これまではロボットの先端に「力覚センサ」と呼ばれる装置を取り付けるアプローチが主流でした。力覚センサは、対象物に触れた際の反発力を電気信号として読み取り、ロボットに「どれくらいの力がかかっているか」を伝える役割を果たします。しかし、この力覚センサ方式には実務上、非常に大きなジレンマが伴います。第一に、センサ自体が非常に高価であり、導入コストが跳ね上がる点です。第二に、センサは感度を高くすればするほど構造が繊細になり、ロボットが予期せぬ障害物に衝突した際の衝撃などで容易に破損してしまうという物理的な弱点を持っています。
さらに、工場などのノイズが多い環境では、センサが微細な電気的ノイズを拾ってしまい、誤作動を引き起こすリスクも常に付きまといます。作業のたびに厳密な調整とキャリブレーションが必要となり、結果として「力覚センサを導入したものの、メンテナンスの手間ばかりが増えて現場で使い物にならない」という事態が頻発しています。このように、従来のロボット制御と既存のセンサ技術の延長線上には、私たちが求める「人間のような柔軟な力加減」を実現するための高い壁が立ちはだかっており、これこそが自動化を妨げる最大のボトルネックとなっているのです。
【会員様限定】 この先に、力加減を「遠隔・自動化」へ繋げる要諦があります
ここから先は、離れた場所の感触をリアルに伝える「バイラテラル制御」の仕組みや、農業の収穫から医療・建設現場まで多岐にわたる産業別ユースケース、そして熟練者の技をコピーして自動化する具体的なアプローチについて詳しく解説します。
この記事で得られる具体的ベネフィット
- 視覚情報だけに頼らず、手の感触を頼りに繊細な遠隔操作を可能にするシステム構築の要領がわかります
- 職人の「位置」と「力」をデータ化して保存し、ロボットで完璧に再現(モーションコピー)する手法が掴めます
- 5Gなどの次世代通信を活用し、通信遅延による不安定化(発振)を防いで安定稼働させる実務的な留意点が理解できます
第2章 センサレスで力を推定する革新技術「リアルハプティクス」とは
従来の力覚センサが抱える物理的・コスト的なジレンマを根本から打ち破るアプローチとして、近年急速に注目を集めているのが、「リアルハプティクス」と呼ばれる日本発の革新的な技術です。この技術は、慶應義塾大学の研究室で生み出されたものであり、一言で言えば「専用のセンサをロボットの先端に取り付けることなく、人間のように柔らかく滑らかな力加減を再現する技術」です。
リアルハプティクスの最大の特徴は、力を感知するための物理的な力覚センサに一切依存しない点にあります。では、センサを使わずにどうやって力を測るのでしょうか。その答えは、ロボットを動かしている「モーター」そのものに隠されています。モーターは、電気を流すことで回転し、ロボットの関節を動かします。ロボットが空中で何も持たずに動いているときと、重い荷物を持ち上げているとき、あるいは固い壁にぶつかって動きを止められたときでは、モーターにかかる負荷が劇的に変化します。負荷が大きくなればなるほど、モーターはより多くの電気を必要とし、逆に負荷が小さければ少ない電気で動くことができます。
リアルハプティクスは、この「モーターに流れる電流の変化」を極めて精密に監視・解析することで、ロボットの先端にどれほどの力がかかっているかをソフトウェアの力で逆算し、推定する仕組みを持っています。この計算の心臓部となるのが「外乱オブザーバ」と呼ばれる高度な推定アルゴリズムです。外乱オブザーバは、ロボットが動く際に受ける摩擦や重力、そして外部からの衝撃や接触による力(外乱)を、瞬時に切り分けて計算します。これにより、物理的なセンサがなくても、まるでそこにセンサがあるかのように、対象物との接触力を高精度かつリアルタイムに把握することが可能になるのです。
この「センサレス」という特徴がもたらすメリットは計り知れません。まず、ロボットの先端に壊れやすいセンサを配置する必要がないため、万が一ロボットが周囲の環境に激突しても、センサが破損してシステム全体が停止するというリスクが消滅します。また、高価な特殊部品を使わず、汎用的なモーターと制御用のソフトウェアだけで構成できるため、導入コストとメンテナンス費用を大幅に削減できます。さらに、物理的なセンサ特有の通信遅延やノイズの影響を受けにくいため、より機敏で滑らかな動きを実現できます。専門用語を省いて言えば、「ロボット自身の筋肉(モーター)の疲労度や踏ん張り具合を感じ取って、脳(コンピュータ)が即座に力を加減する仕組み」を構築したのが、このリアルハプティクスという技術なのです。従来は硬い動作が基本だったロボットに、柔軟な「触覚」と「しなやかさ」を付与する重要な技術的進展といえます。
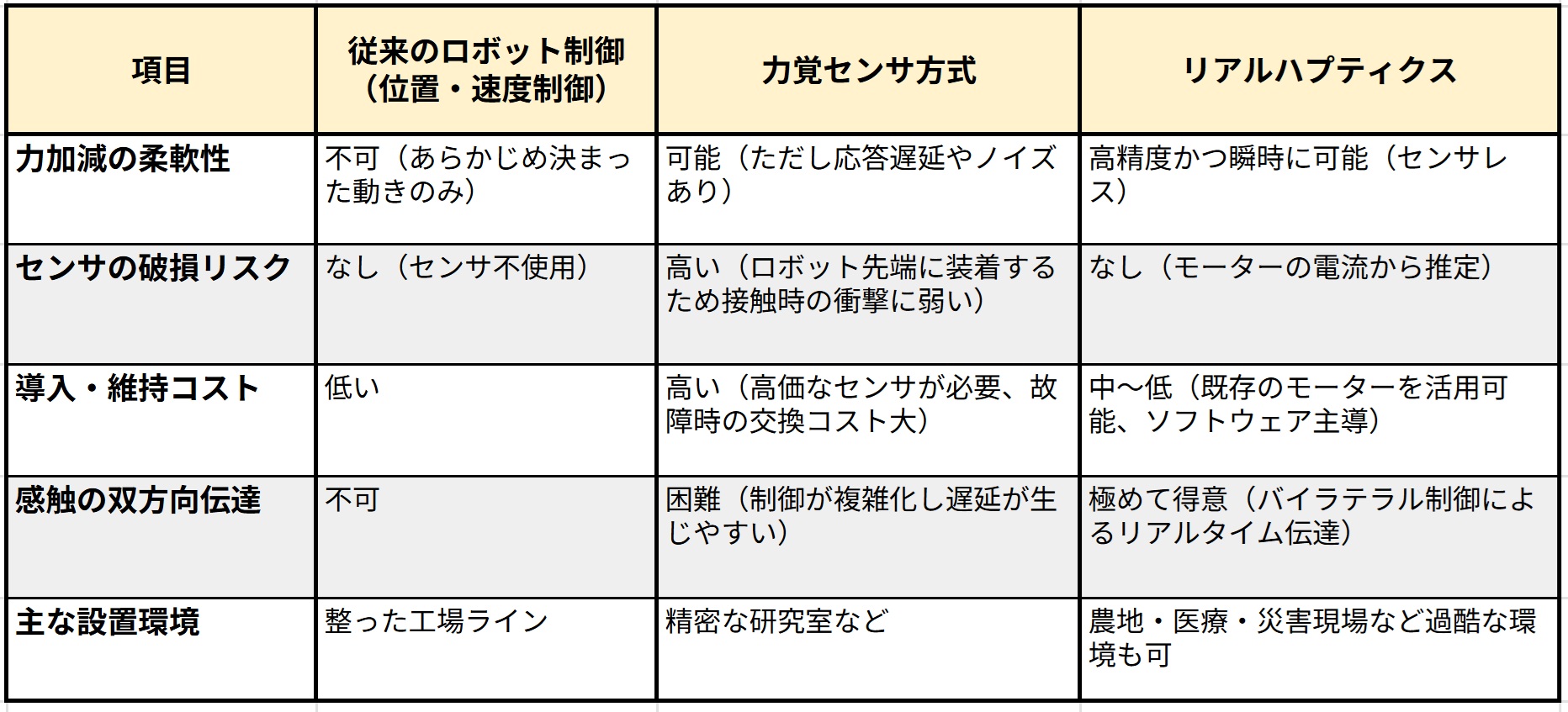
表. リアルハプティクスと従来技術の比較整理表
第3章 離れたモノの感触を手に伝える、中核技術「バイラテラル制御」の仕組み
リアルハプティクスの真骨頂は、単にロボットが自律的に力加減を調整できることだけではありません。この技術をさらに実用的なものとし、産業界に革命をもたらす中核技術が「バイラテラル制御(双方向制御)」です。バイラテラル制御とは、人間の手元にある「操作用のコントローラー(操作側)」と、遠隔地で実際に作業を行う「ロボット(作業側)」との間で、動き(位置)と感触(力)の情報を、双方向に遅延なく伝え合う仕組みのことです。
従来の遠隔操作ロボット(例えば、クレーンゲームやテレビゲームのコントローラーを想像してください)は、人間がレバーを倒した分だけロボットが動くという「一方通行」の指示しかできませんでした。ロボットが硬い壁にぶつかっても、柔らかいぬいぐるみを掴んでも、操作している人間の手には何の感触も返ってきません。そのため、人間はモニターに映るカメラの映像だけを頼りに、「おそらくこれくらいだろう」という勘で操作するしかなく、結果として対象物を壊してしまったり、作業に膨大な時間がかかったりしていました。
しかし、バイラテラル制御を組み込んだリアルハプティクスシステムでは、状況が全く異なります。人間が操作側のコントローラーを動かすと、その「位置情報」が作業側のロボットに送られ、ロボットが同じように動きます。ここまでは従来と同じです。画期的なのは、作業側のロボットがモノに触れた瞬間に発生します。ロボットがモノに触れて反発力(力情報)を感知すると、その力情報が瞬時に操作側のコントローラーに送り返され、コントローラーのモーターを駆動して人間の手に「抵抗感」として伝達されるのです。
つまり、作業側のロボットが硬い金属を叩けば、手元のコントローラーもカツンと硬い抵抗を示し、ロボットが柔らかいスポンジを握れば、コントローラーもフワッとした柔らかい反発力を人間の手に伝えます。これにより、操作者はモニターの視覚情報だけでなく、手のひらに伝わる「リアルな触覚」を頼りに作業を進めることができます。まるで、自分の腕がどこまでも長く伸びて、遠く離れた場所にあるモノに直接触れているかのような錯覚に陥るほどの精度です。
この双方向の情報のやり取りは、一瞬の遅れも許されないため、高度な通信技術とリアルハプティクスの高速な力推定アルゴリズムが不可欠です。この仕組みが完成することで、実務における課題は劇的に解決へと向かいます。「壊さずに掴む」ことが直感的に行えるため、卵やケーキのような繊細なものであっても、遠隔操作で軽々と扱うことができます。また、操作のたびに特別な訓練を積む必要がなく、人間が本来持っている「感覚」をそのまま活かして直感的に操作できるため、作業者の疲労軽減や操作ミスの防止に直結します。遠隔操作の有用性を大きく高めるバイラテラル制御は、リアルハプティクスを実務的な課題解決ツールとして活用するための重要な要素となります。
第4章 医療から農業まで、リアルハプティクスが切り拓く産業別ユースケース
ここまでは、リアルハプティクスの理論的な背景と技術的な仕組みについて解説してきましたが、この章では、実際にどのような現場でこの技術が役立つのか、具体的な産業別の応用例について詳しく見ていきます。柔軟な力加減と遠隔への感触伝達という特性は、これまでのロボットでは不可能だった未開拓の領域へ自動化の波を広げています。
一つ目の例は「農業分野」です。農業における収穫作業、特にトマトやイチゴ、桃といった柔らかい果実の収穫は、熟練者の絶妙な力加減が不可欠であり、機械化が最も困難な領域の一つでした。少しでも強く握れば果実が傷んで商品価値が落ち、弱すぎればポロリと落としてしまいます。しかし、リアルハプティクスを搭載したロボットアームであれば、果実の表面に触れた瞬間の微細な反発力を感知し、優しく包み込むように掴むことができます。これにより、これまで人手に頼るしかなかった果実の自動収穫システムが現実のものとなり、深刻な農業の人手不足解消への大きな一歩となります。
二つ目の例は「医療分野」、特に遠隔手術支援への応用です。手術において、医師はメスから伝わる組織の硬さや、糸を結ぶ際の引っ張り具合など、指先の繊細な感覚を頼りに処置を行います。従来の遠隔手術ロボットは視覚情報がメインであり、触覚のフィードバックが乏しいことが課題でした。ここにリアルハプティクスのバイラテラル制御を導入することで、遠く離れた病院にいる執刀医の手元に、患者の臓器の弾力や血管の感触をリアルタイムに伝えることが可能になります。これにより、より精緻で安全な手術が実現し、地域医療における専門医不足の解消や、緊急時の高度医療の提供に大きく貢献することが期待されています。
三つ目の例は「建設・インフラ分野」、特に災害現場や極限環境での重機操作です。地震や土砂崩れなどの災害現場は、二次災害のリスクが高く、人が直接立ち入ることが困難です。そのため無人重機による遠隔操作が行われますが、これまではカメラの映像だけを頼りに巨大なアームを動かすため、瓦礫を掴む際の力加減が分からず、作業効率が著しく低下していました。リアルハプティクスを重機の操作レバーに応用すれば、瓦礫の重さや土砂の抵抗感が直接オペレーターの手に伝わります。視界が悪い状況でも、手の感覚だけで障害物を探り当て、崩れやすい対象物を慎重に撤去するなど、直感的で迅速な復旧作業が可能となります。
最後は「製造業」における新たな自動化のアプローチです。これまで、研磨作業や組み立て作業における「職人のカンやコツ」は、データ化が非常に困難でした。しかし、熟練工がリアルハプティクス搭載のコントローラーを使って一度作業を行えば、その際の「位置の動き」と「力加減の変化」をすべてデジタルの数値データとして記録することができます。記録したデータは、そのままロボットに読み込ませることで、職人の絶妙な力加減を何度でも完璧に再現(モーションコピー)することが可能になります。これにより、属人化していた匠の技を次世代の生産ラインへシームレスに継承し、高品質なものづくりを維持し続けることができるのです。
第5章 導入に向けた実務上の壁と今後の展望
リアルハプティクスは、産業のあり方を一変させるほどの可能性を秘めた技術ですが、夢の技術として手放しで喜ぶ前に、実際のビジネスや現場へ導入する際に直面する実務上の壁についても客観的に理解しておく必要があります。
最大の課題は、バイラテラル制御に不可欠な「通信遅延」への対策です。操作側と作業側の間でリアルタイムに力と位置の情報をやり取りするためには、通信のタイムラグが極限までゼロに近くなければなりません。わずかな遅延が発生しただけで、手に伝わる感触が不自然になり、システム全体が不安定になって激しく振動してしまう現象(発振)を引き起こす危険性があります。同じ工場内や専用回線であれば問題ありませんが、遠隔地同士をインターネット越しに結ぶ場合、通信インフラの安定性が技術の成否を分ける決定的な要素となります。また、既存のロボット設備をリアルハプティクス対応に置き換えるための初期導入コストや、高度な制御を行うための演算装置をロボット内に組み込む「システムの小型化・軽量化」も、広く普及させるための重要なハードルです。
しかし、これらの壁は決して乗り越えられないものではありません。通信遅延の問題については、次世代の高速大容量・超低遅延通信規格である「次世代通信ネットワーク」の普及が強力な追い風となります。大容量のデータを瞬時にやり取りできる通信インフラが社会の隅々まで行き渡ることで、地球の裏側にあるロボットすらも、遅延を感じることなく手足のように操れる時代がすぐそこまで来ています。
さらに、リアルハプティクスが収集した「力のデータ」を、人工知能と組み合わせることで、自動化は次の次元へと進化します。熟練技術者の作業データを人工知能に大量に学習させることで、ロボット自身が「未知の状況に遭遇しても、過去の力のデータから最適な力加減を自律的に判断して行動する」という、真の意味での自律型作業ロボットの実現が視野に入ってきます。
リアルハプティクスは、単なるロボット制御の一手法にとどまらず、人間の「触覚」という極めてアナログで属人的な感覚をデジタル化し、熟練した感覚をデジタル化し、共有・保存することを可能にする基盤技術です。導入における技術的・コスト的な課題を冷静に見極めつつも、通信技術や人工知能との融合が描く未来の現場を想像し、自社の課題解決に向けた有効な手段の一つとして、リアルハプティクスの活用を検討してみてはいかがでしょうか。