-

3次元モデリング/自由視点画像生成のための「NeRF」の基礎
全国51,7002024-05-23 -

画像認識技術入門
全国53,9002024-07-22 -
画像認識技術の初歩
全国51,7002024-05-17 -

外観検査自動化に向けた画像処理・AI技術活用の課題と導入のポイント
全国49,5002024-06-19 -

機械学習を用いた画像認識技術の基礎とその応用
全国57,2002024-06-19 -
電気電子工学概論
11,000オンデマンド -
画像認識のためのディープラーニングとモデルの軽量化
全国53,9002024-05-24 -

メカトロニクス機器の設計技術 【具体設計編】
11,000オンデマンド

Visual SLAM(vSLAM) 入門編
本セミナーでは,3次元計測やロボットの自動制御,拡張現実感の基盤技術として利用されるVisual SLAM(vSLAM)の技術を解説します.特に,vSLAMを初めて学ぶ人,vSLAMに用いられる画像処理・カメラ幾何の基礎から学びたい人を対象とし,vSLAMの基本的な知識を身に着けられることを目的とします.初めに,特徴点マッチング・トラッキングなどの画像処理技術や,透視投影モデル・三角測量といった、カメラ幾何の基礎を説明します.次に,vSLAMにおいて,カメラの位置姿勢推定と3次元計測がどのような手順によって実現されるかといったvSLAMの原理を説明します.最後に,単眼カメラ及びRGBDカメラを用いたvSLAMの代表的な手法及び評価方法を解説します.
【講師】
内山 英昭 氏、九州大学 大学院システム情報科学研究院 助教 博士(工学)
【プログラム】
1. vSLAMに用いられる画像処理技術
2. vSLAMに用いられるカメラ幾何
3. vSLAMの原理
4. vSLAMの従来手法
5. vSLAMの評価方法
受講料
・お1人受講の場合 47,000円[税別]/1名
・1口でお申込の場合 59,000円[税別]/1口(3名まで受講可能)
受講申込ページで2~3名を同時に申し込んだ場合、自動的に1口申し込みと致します。
関連セミナー
もっと見る-

3次元モデリング/自由視点画像生成のための「NeRF」の基礎
全国51,7002024-05-23

関連教材
もっと見る





関連記事
もっと見る-

普通の組織をイノベーティブにする処方箋 (その174)イノベーション創出
【目次】 【この連載の前回:普通の組織をイノベーティブにする処方箋 (その173)へのリンク】 前回まで自分が生物... -
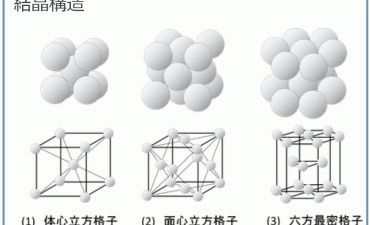
シリカ、シリコン、シリコーンの違いをわかりやすく解説
シリカ、シリコン、シリコーンこの単語、みなさんの生活の中で聞いたことがあるかと思います。みなさんは、この3つの違いがわかりますか?実は...